ROV Emulator
The ROV motion emulator maps between commands to the “virtual” ROV from the research software and the testbed’s software drivers
Interfaces
In Interfaces
TBD…
Out Interfaces
The system passes through the remapped messages it receives. The expectation is that is will pass on trajectory_msgs/JointTrajectory actions (and topics?) to the joint_trajectory_controller in the testbed software.
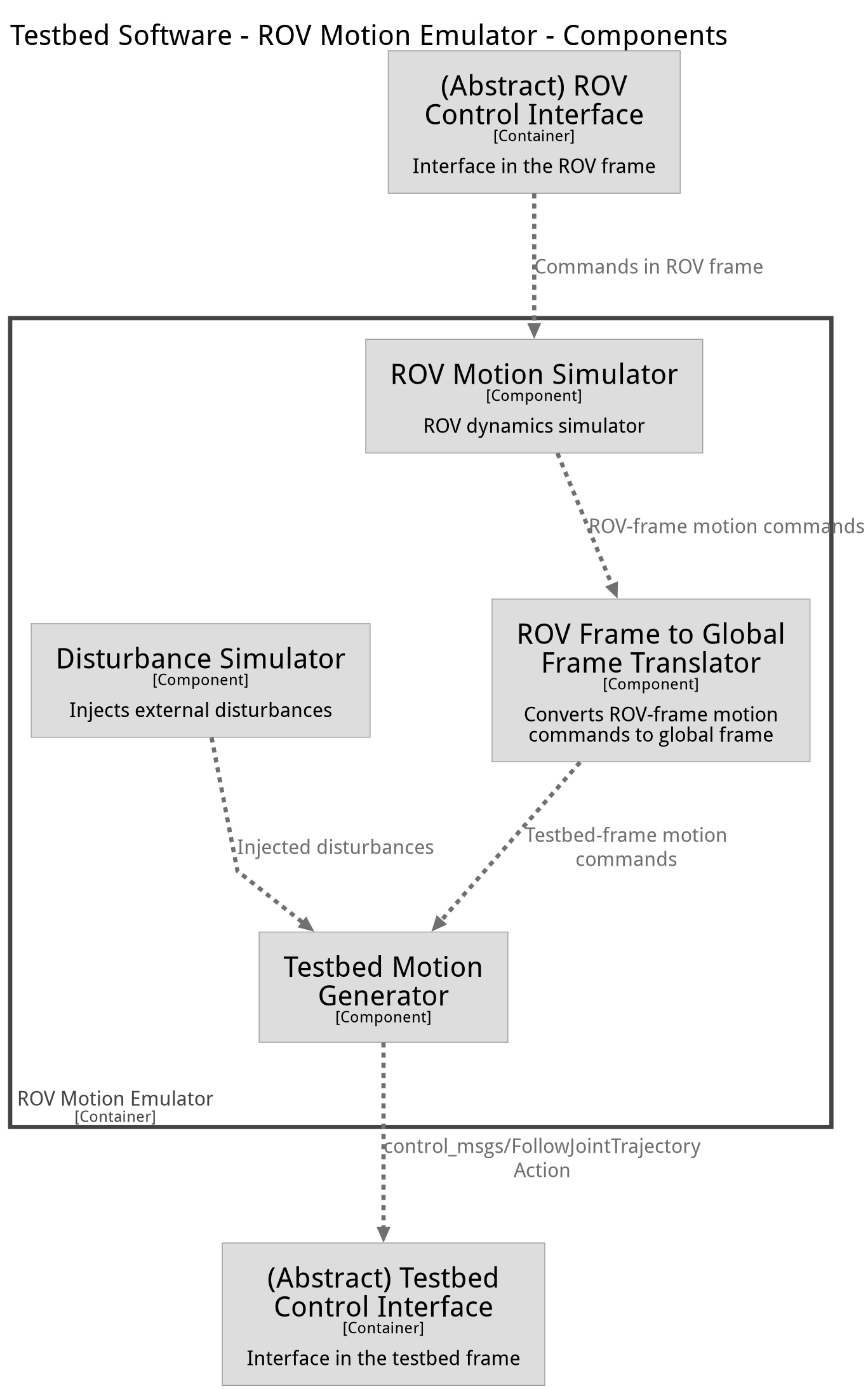
Components
ROV Frame Translator
Translates between the vehicle-relative coordinate frame and the global frame of the testbed.
ROV Motion Simulator
Implements ROV motion (inertia, etc.)