Testbed overview
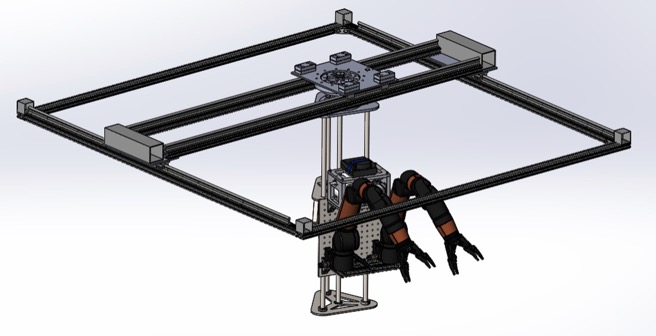
Hardware
The Testbed has a total of four motors.
Additional informal information on the testbed wiki
Software
The testbed software communicates with the testbed hardware.
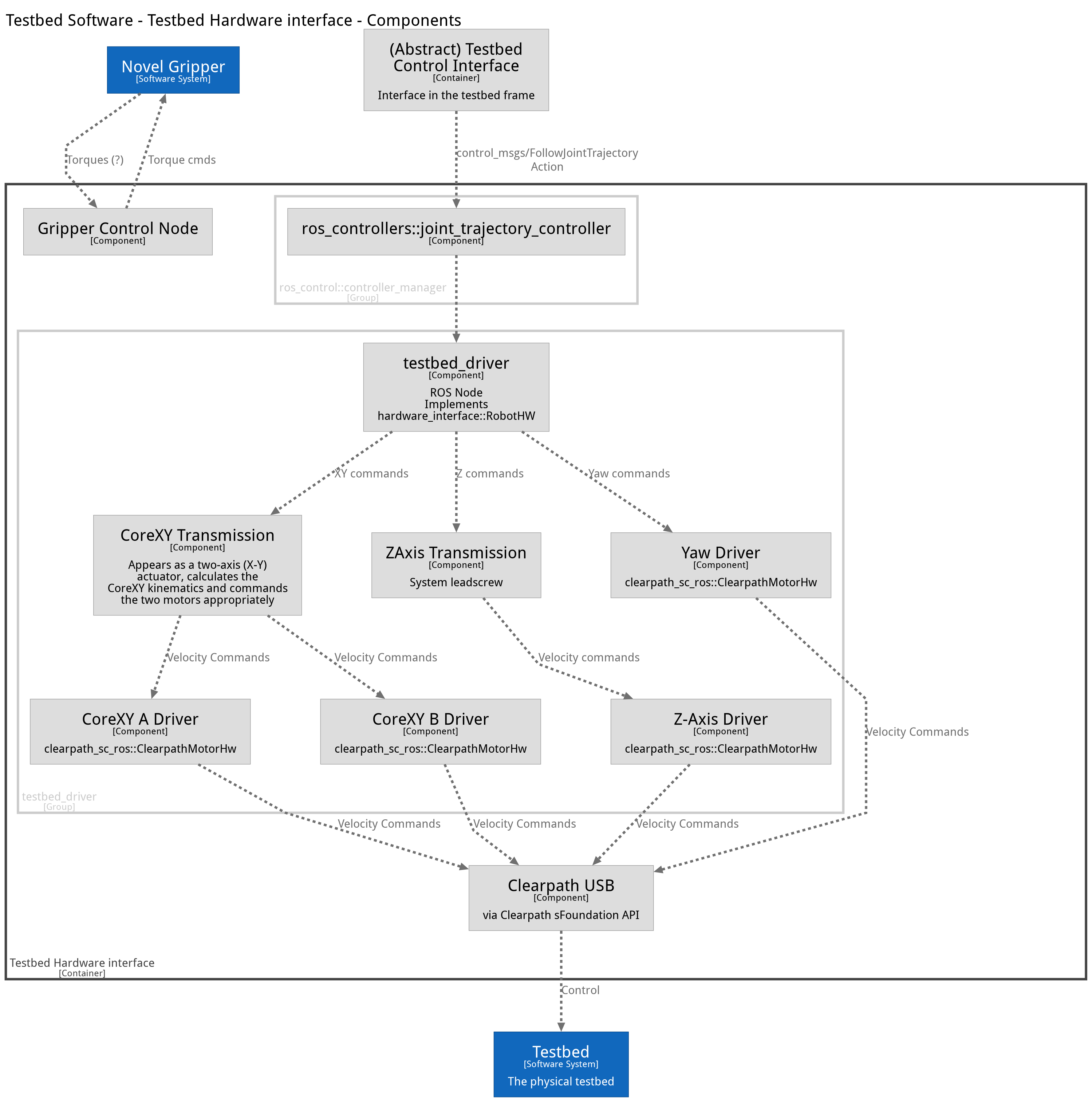
The interface is written using the ros_control infrastructure. The main node implements the ros_control hardware_interace::RobotHW and includes a controller_manager.
The controller_manager interface lets the system dynamically load different control algorithms. I believe we will use the joint_trajectory_controller controllers.
The end user may communicate with the testbed hardware interface directly (to control the testbed directly), or can communicate with the ROV emulator